Problemlösungen - Schrittmotortreiber & Angelschnur
Erst einmal zur Angelschnur:
Seit längerem steht nun der 3D Drucker mit parallelkinematik ohne Weiterarbeit herum. Die von mir erwähnte Angelschnur hat wirklich zu viel Dehnung mitgebracht, dies hat sich so geäußer, dass die Schlitten erst nach überwinden der Reibkräfte stark beschleunigen und dann wieder abbremsen. Daraus resultiert eine ruckelnde nicht gleichförmige Bewegung. Sehr wichtig ist es eine "Multifilamente" Angelschnur mit eine extrem geringen Dehnung zu verwenden.
Die Trägheitskräfte resultieren aus Massen die beschleunigt werden. Dieser Drucker erreicht ordentliche Beschleunigungen, die bewegten Massen sind aber extrem gering, somit entstehen sehr geringe Trägheitskräfte. Die Folge ist, dass eine extrem dünne Angelschnur eingesetzt werden kann.
Ich verwende bei mir die "STROFT GTP-S5"-hält 13kg aus, natürlich völlig überdimensioniert; bei ebay oder auf www.stroft.de zu erwerben.
Und nun zu der Referenzspannung und einstellung der Schrittmotortreiber:
Unten zu sehen ist die RAMPS 1.4 und deren drei Schrittmotortreiber. Diese Black Edition ist von SainSmart auf Ebay. Also Chinaware. Selbstverständlich wundert es keinen wenn mal was fehlt. Hier hat etwas extrem wichtiges gefehlt oder mir hat es einfach an Verständnis gefehlt...bin kein Elektrotechniker, wobei das nichts zur Sache ist.
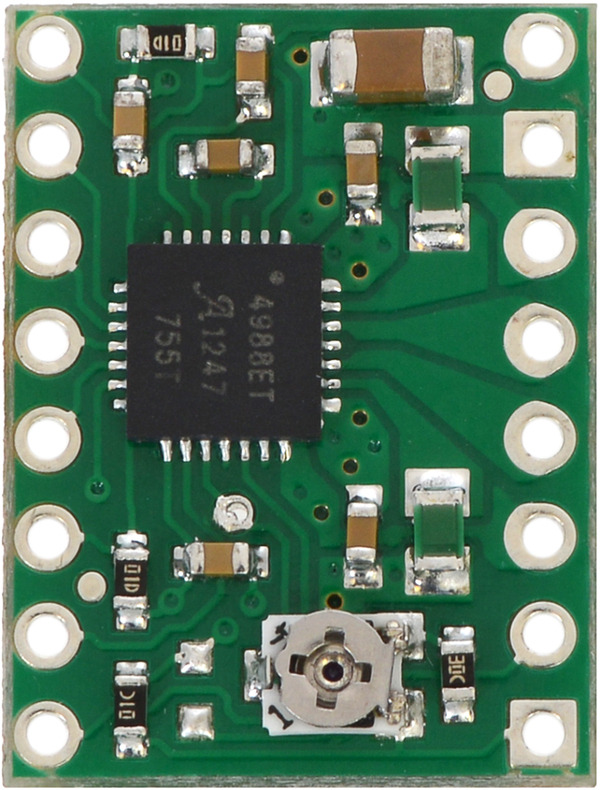 Die Schrittmotoren von Polulu http://www.pololu.com/product/1182 haben z.B. einen hier auf der Höhe des dritten PINS eine Bohrung um mit dem Messfühler die Referenzspannung mit GND abzugreifen und den Treiber so einzustellen. Hierbei würden ungefähr 0,45V - 1Amp Motorstrom entsprechen. -> Bei den SainSmart Treiben fehlt dieses Pad. Ich habe versucht mit meinen dicken Fühlern vom IC-Pin3 die Spannung abzugreifen, rutschte bei dem GND PIN ab und traf den ersten PIN des benachbarten Treibers, erzeugte einen Kurzschluss und komischerweise ist es noch teilweise funktionsfähig. Aber die Motoren stottern plötzlich alle.
Die Schrittmotoren von Polulu http://www.pololu.com/product/1182 haben z.B. einen hier auf der Höhe des dritten PINS eine Bohrung um mit dem Messfühler die Referenzspannung mit GND abzugreifen und den Treiber so einzustellen. Hierbei würden ungefähr 0,45V - 1Amp Motorstrom entsprechen. -> Bei den SainSmart Treiben fehlt dieses Pad. Ich habe versucht mit meinen dicken Fühlern vom IC-Pin3 die Spannung abzugreifen, rutschte bei dem GND PIN ab und traf den ersten PIN des benachbarten Treibers, erzeugte einen Kurzschluss und komischerweise ist es noch teilweise funktionsfähig. Aber die Motoren stottern plötzlich alle.
So wird eingestellt: Ein Messfühler auf den Metallring des Potis legen und den anderen auf GND. Der Metallring des Potis liefert die gleichen Werte wie PIN3 am IC und am REF PAD.



Kommentare
Kommentar veröffentlichen